- Home
- Learn Linux
- Learn Electronics
- Raspberry Pi
- Programming
- Projects
- LPI certification
- News & Reviews

Google Ads
This is a custom designed robot which I designed using FreeCAD and a 3D printer. It is based around the Mecanum omndirectional wheel which allows the robot to move in any direction. As well as being able to go forwards, backwards and turn it can also move side to side and diagonally. This is best understood by watching it in motion in the video above.
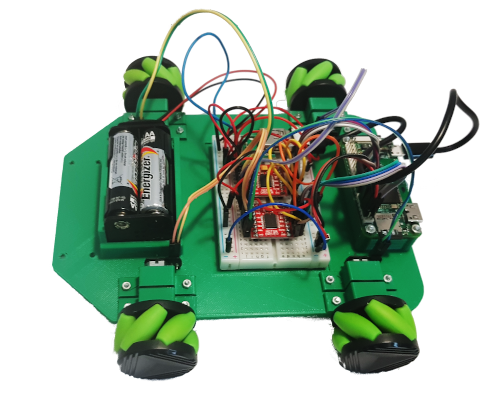
This is an omnidirectional robot which not only goes forwards, backwards and turns, but can also travel sideways and diagonally. This is thanks to the mecanum wheels with built in rollers that can operate differently to the direction of the motor.
This is all explained in the video which includes an animation (created in Blender) showing how the direction of the motor wheels causes the robot to move.
The code to control the robot is return in Python using gpio zero. It uses the keyboard presses to control the robot, but that can be controlled using qjoypad and a wireless controller.
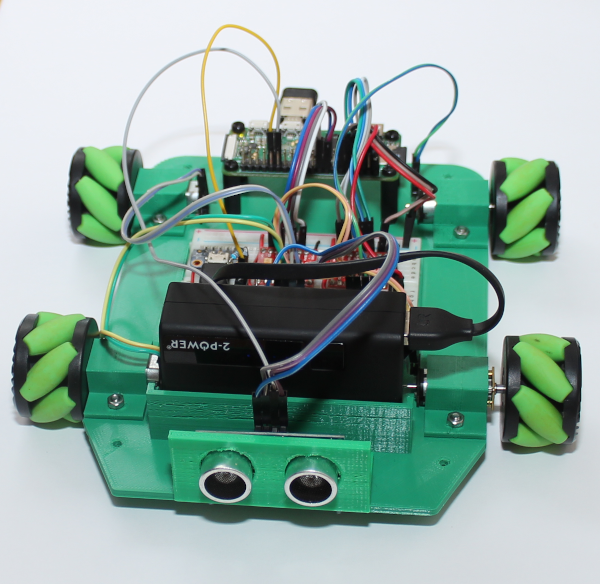
The chassis is designed in FreeCAD based around a simple shape with additional mounts for the Raspberry Pi, the Breadboard and a 4 x AA battery holder. There are also custom designed brackets used to hold the motors (298:1 gear ratio) in place. This is demonstrated using the Meshlab STL viewer.
This has been updated as part of a tutorial for the MagPi magazine. The new chassis has improved motor brackets, optional 2nd layer for larger batteries, ultrasonic distance measure mounting bracket and accepts two different types of batteries on the bottom level of the chassis.
The below files are from version 1
These links provide more information about the robot and other related information
For the latest updates please:
Subscribe to the PenguinTutor YouTube Channel
and
Follow @penguintutor on Twitter
Please view the copyright information regarding use of the circuits.

